电话:400-6368-3512
地址:山东潍坊

400-6368-3512
都是电子设计的一个基本方面。机器人和电动汽车 (EV) 等领域需要对电机进行电路和固件控制,以可靠地影响给定设备的运动。
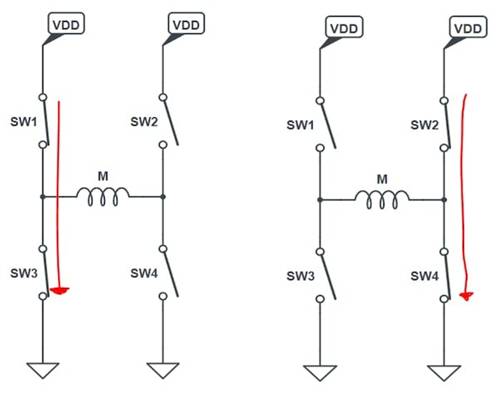
在几乎所有机电应用中,电机控制都是电子设计的一个基本方面。机器人和电动汽车 (EV) 等领域需要对电机进行电路和固件控制,以可靠地影响给定设备的运动。每种类型的电机都有自己的控制要求,需要独特的电路和正确操作的理解。在本文中,我们将了解直流电机控制、H 桥电路和互补PWM等控制技术。H 桥工作原理——什么是 H 桥电路?在驱动和控制直流电机时,基本和应用广泛的电路是 H 桥。可以在TI 的数据表中看到一个示例。如图 1 所示,H 桥由四个开关组成,通常使用围绕直流电机的“H”形拓扑结构中的金属氧化物半导体场效应晶体管(MOSFET) 来实现。
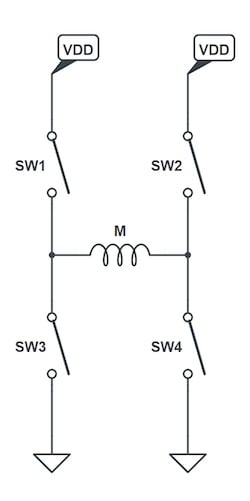
H 桥可当作直流电机控制的有用电路,因为它通过有选择地打开和关闭一系列这些开关来控制电机的方向和速度。如图 2 所示,通过在 SW2 和 SW3 关闭的同时打开 SW1 和 SW4,我们大家可以控制电流以特定方向流过电机,从而使其朝一个方向转动。
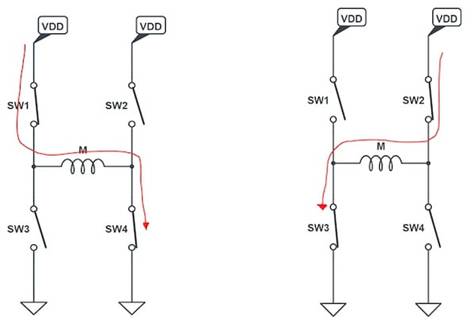
要以相反的方向转动电机,我们执行相反的操作,让 SW1 和 SW4 保持关闭状态,同时打开 SW2 和 SW3。非重叠或互补PWM实际上,H 桥中的开关其实就是使用 MOSFET 实现的,如图 3 所示
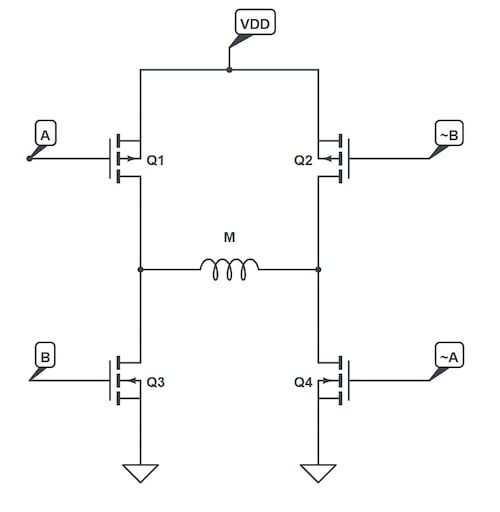
尽管情况并非总是如此,但H 桥通常设计为将高侧开关(即连接到 VDD 的 FET)实现为 PMOS 器件。而低侧开关(即连接到 GND 的 FET)作为 NMOS 器件实现。在驱动电机时,我们旨在控制的主要两件事是它的速度和方向。要在实践中做到这一点,标准做法是使用PWM驱动 MOSFET 栅极。使用 PWM,我们大家可以通过控制电机的占空比(即它打开的时间百分比)来控制电机的速度,这样我们就能够准确的通过需要为电机提供尽可能多或尽可能少的功率。在图 3 中进一步显示,Q1 和 Q4 的栅极以及 Q2 和 Q3 的栅极由彼此互补的信号驱动。这种控制方案,其中多个门由 PWM 信号 180° 异相[视频] 彼此驱动,被称为互补 PWM。如图 4 所示,此设置可确保当 Q1 的栅极为低电平时,Q4 的栅极同时为高电平。
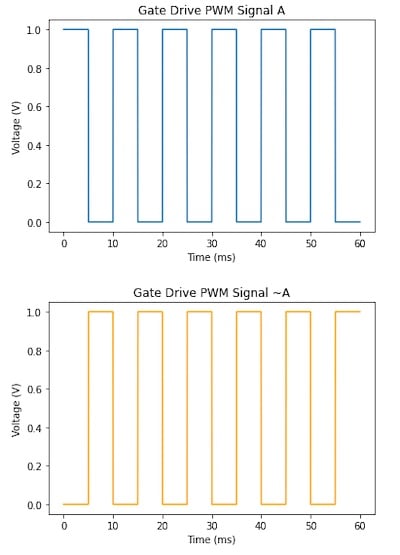
由于 Q1 是 PMOS,Q4 是 NMOS,该动作同时关闭开关 Q1 和 Q4,允许电流正向流过电机。在此期间,Q2 和 Q3 必须打开,这在某种程度上预示着 Q2 的栅极为高电平而 Q3 的栅极为低电平。电机控制安全:PWM 直通在 H 桥中使用互补 PWM 时的一个主要考虑因素是短路的可能性,也称为“直通”。如图 5 所示,如果同一桥臂上的两个开关同时导通,则 H 桥配置可能会在电源和地之间造成直接短路。
这种情况可能很危险,因为它可能会引起晶体管和整个电路过热和损坏。由于固有器件延迟和非理想情况(例如栅极电容和二极管反向恢复效应),直通成为基于 FET 的 H 桥的主要考虑因素。这些影响的结果是 MOSFET 不是理想的开关,并且在栅极控制信号打开/关闭与 MOSFET 本身打开/关闭之间有小的时间延迟。由于这种延迟,互补 PWM 信号可能会意外导致同一桥臂上的 H 桥 MOSFET 同时导通,因此导致击穿。用于直流电机控制的 PWM 死区时间未解决由 FET 非理想情况引起的直通,标准解决方案是在 PWM 控制中实施死区时间。在直流电机控制的背景下,死区时间是在驱动同一 H 桥桥臂上的开关的 PWM 信号的开关边沿之间插入的一小段时间(图 6)。
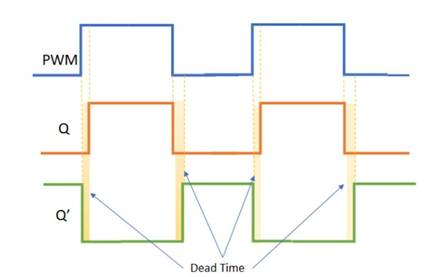
通过在一个 FET 关闭和另一个 FET 导通之间留出时间缓冲,死区时间可确保同一支路上的两个晶体管不会同时导通,从而防止击穿。虽然存在死区时间电路,但它通常在固件中实现,其中微控制器(MCU)定时器可以在互补信号之间生成所需的死区时间。
电话:400-6368-3512
地址:山东潍坊